

* 订单金额满100元免运费




ID M3系列 交流输入伺服电机驱动器 全闭环 多种控制模式
新开发的M3系列220VAC交流输入驱动器。支持PID增益参数自动整定的同时,新增了免调试功能,全系列都内置再生能吸收电阻,结合STO及动态制动模块(部分型号),相对于M2系列更加安全可靠,支持位置模式、速度模式、转矩模式及Q编程,支持Modbus,CANopen,EtherCAT,EtherNet/IP,Ethernet(eSCL)等工业现场总线。基于双位置反馈的全闭环控制(部分机型),M3系列提升了系统的最终定位精度。
● 新增主电源断电/缺相检测 ● 新增免调试功能
● 新增实时示波器功能 ● 更好的共振抑制表现
● 支持动态制动及STO(可选) ● 支持各类现场总线及控制模式
● 可实现多轴调试 ● 两种I/O连接器可选
● 新增实时示波器功能 ● 更好的共振抑制表现
● 支持动态制动及STO(可选) ● 支持各类现场总线及控制模式
● 可实现多轴调试 ● 两种I/O连接器可选
 买家保护:
买家保护:





| What’s NEW |
|---|

丰富的产品阵容
▪ 40/60/80/100/130mm 机座▪ 低惯量、中惯量、高惯量伺服电机
▪ 功率范围100W到3kW
高精度编码器
配备高分辨率编码器,使得伺服系统运行更加平稳、精度更高。编码器采用串行通讯方式,接线简单、抗干扰能力强。 23-bit增量式 / 绝对值光电编码器▪ 分辨率高达达8,388,608脉冲/圈
▪ 使用备用电池记录16-bit多圈数据 17-bit无电池绝对值编码器
▪ 分辨率高达131,072脉冲/圈
▪ 无需电池即可记录16-bit多圈数据,减少系统维护成本 17-bit增量式磁性编码器
▪ 分辨率高达131,072脉冲/圈
▪ 良好的耐恶劣环境的能力
▪ 抗振动能力强
▪ 防尘、防油


低齿槽转矩
▪ 全新设计的伺服电机,大幅降低电机的齿槽转矩,使得电机的转速及转矩波动更小。▪ 配合高达23-bit的高精度编码器, 在匀速及低速时,设备运行平稳性更好。
两种I/O连接器可选
50Pin 的高密度连接器,提供丰富的输入输出信号。接线采用焊接方式,连接器使用螺丝紧固在伺服驱动器上。(图左) 26Pin 弹簧式连接器。接线快捷、可靠,连接器无需螺丝锁定。(图右) |  |
| 调试简单 |
|---|
免调整功能
▪ 无需精通伺服增益调试原理,无需繁杂增益整定。基于全新的伺服控制算法,在最大30倍的负载惯量比下也可以稳定运行。▪ 不受控制指令类型(脉冲/模拟量/通讯指令)和机械负载类型的限制。
▪ 即使运动过程中负载发生变化,机械设备也能稳定运行。


自动整定
基于增益参数自动整定算法,在运转过程中,实时自动辨识负载惯量(比)、自动设定增益参数、振动抑制参数和共振抑制陷波器参数。通过参数自动整定,可以大幅缩短伺服调试时间。
共振抑制
提供4组可以抑制设备共振的陷波滤波器 ▪ 2组自动设定的陷波滤波器,可以通过自动整定来消除共振,节省调试时间。▪ 2组手动设定的陷波滤波器,可以通过软件来分析共振频率并设定。


机械末端振动抑制
机械末端的振动会造成系统整定时间过长,使得产品精度或者生产效率下降。M3系列产品通过参数自动整定即可抑制机械末端的共振,从而缩短整定时间,提升产品精度。| 运行可靠 |
|---|
STO
安全转矩禁止(Safe Torque Off)是一种硬件级的安全保护功能。当STO工作时,驱动器的硬件电路会触发,强制关闭驱动器内部的功率管,从而阻止电机运转,驱动器处于非使能状态。可以在紧急情况下,在驱动器不断电的同时保护人身及设备的安全。M3系列符合UL61800-5-2(SIL2),IEC61508,ISO138491(PL d)。

动态制动模块
 |  | |
| 无动态制动。 当驱动器发生故障报警后,驱动器去使能。电机处于不可控的自由减速停止状态,停止时间取决于去使能时电机的转速、拖动的负载惯量及机械上的摩擦力等外部因素。 | 有动态制动。 当驱动器发生故障报警后,驱动器去使能的同时,将电机三相短路,利用反电势在电机绕组中产生的电流转矩,以最快速度停止。大幅减少减速时间,保护设备和人身的安全。 |

内置再生能量吸收电阻
750W及以上功率段驱动器都内置了再生能量吸收电阻,可以消耗电机减速时产生的再生能量,确保伺服系统能够快速停止,可靠运行。不需要外加的吸收电阻就可以满足大部分的应用。
主电源断电/缺相检测
在主电源交流输入侧检测主电源是否断电或者缺相,为伺服系统因突然断电而造成意外提供更快的保护措施。
| 特色功能 |
|---|

全闭环
通过外部光栅尺直接反馈负载设备的机械实际位置,基于双位置反馈的全闭环控制,提升设备最终定位的定位精度。也能提高伺服响应,抑制机械振动,提高设备可靠性。内置软PLC — 特有的Q编程功能
Q程序是鸣志建立在SCL指令基础之上的一个专业平台,扩展SCL命令的使用,允许用户创建与存储SCL指令。这些程序可以保存在驱动器的非易失性存储器中,驱动无需上位机即可独立运行这些程序。Q程序为系统设计提供高度的灵活性和强大的功能。可以大大简化上位机例如PLC等控制器的编程工作。特性
▪ 运动控制指令(例如点到点相对运动、绝对运动、回原点等)
▪ 多任务处理指令
▪ 条件判断指令(例如外部输入中断指令、比较指令等)
▪ 数据寄存器运算指令(例如加、减、乘、除、与、或等指令)
▪ 外部I/O处理(例如外部输入判断,驱动器输出控制等指令)
▪ Q程序的逻辑运行指令(例如循环、调用)

更多功能
| 位置/ 速度/ 转矩控制 | 支持位置控制、速度控制、转矩控制。 ▪ 位置控制支持脉冲、模拟量、内部位置表或者通讯指令。 ▪ 速度控制支持模拟量、内部多段速或者通讯指令。 ▪ 转矩控制支持模拟量、内部转矩或者通讯指令。 |
|---|---|
| 控制模式切换 | 可使用外部数字量输入切换位置控制、速度控制、转速控制。 -P,-R 机型可任意切换2 种控制模式。 |
| 增益切换功能 | 可在一定条件下自动切换运转中与停止时的增益。或者通过数字量输入自由切换两组增益。 |
| 内部多段速指令 | 驱动器内部可保存8段速度,并通过数字量输入选择所对应的内部速度控制指令。 |
| 脉冲输入禁止功能 | 当脉冲禁止输入信号有效时,驱动器忽略外部脉冲指令,电机减速停止。 |
| 内部软件位置限位 | 在绝对值系统中,可以设定软件位置限位,无需外部硬限位即可保护设备运行。 |
| 输入、输出信号分配功能 | 可通过参数将输入功能分配到任一输入引脚。 可通过参数将输出功能分配到任一输出引脚。 |
| 编码器反馈输出 | 将电机编码器反馈、第二编码器反馈以A/B/Z 脉冲方式输出,支持脉冲分频输出。 支持将位置指令脉冲By-pass 输出。 |
| 模拟量控制输入 | 2 路模拟量电压输入,可以用于模拟量转速控制以及模拟量转矩控制。 |
| 模拟量监控输出 | 2 路模拟量输出,实时以电压方式输出电机的指令转速、指令转矩或者实际转速、实际转矩或位置误差。 |
| 零速箝位功能 | 在速度控制模式下,零速箝位信号有效时,当指令速度为0,同时转速小于零速判断阈值时,伺服电机进入零位置锁定状态。此时驱动器内部位置环控制,即使因为外力发生旋转,也会返回箝位时的位置。 |
| 停止方法设定 | 在伺服OFF 或发生故障报警时可以设定电机的停止方式( 如自由停止、减速停止、动态制动) 及停止后的状态。 |
| 运动指令平滑功能 | 指令平滑功能是对位置指令,转速指令进行滤波,即使指令有突变也能使伺服电机的运转更平滑。 |
| 命名规则 |
|---|

| 驱动器一览 |
|---|
| 控制功能类别 | -P: 脉冲控制 | -R: RS-485 通讯 | -EC: EtherCAT | -C: CANopen | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 机种类别 | F型 | R型 | N型 | F型 | R型 | D型 | X型 | N型 | T型 | X型 | N型 | X型 | N型 | |
| 控制模式 | 位置模式 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| 速度模式 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | |
| 转矩模式 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | |
| Q编程模式 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ||||
| 全闭环 | ● | ● | ● | ● | ● | ● | ||||||||
| 接口 | 脉冲控制输入 | ● | ● | ● | ● | ● | ● | ● | ● | ● | ||||
| 2路模拟量输入 | ● | ● | ● | ● | ● | ●* | ● | ● | ||||||
| 2路模拟量输出 | ● | ● | ● | ● | ||||||||||
| 10输入/6输出(数字量) | ● | ● | ● | ● | ● | |||||||||
| 8输入/4输出(数字量) | ● | ● | ● | ● | ||||||||||
| 4输入/4输出(数字量) | ● | ● | ● | ● | ||||||||||
| 编码器反馈输出 | ● | ● | ● | ● | ● | ● | ● | ● | ● | |||||
| 第二编码器输入 | ● | ● | ● | ● | ● | ● | ||||||||
| 通讯接口 | USB(配置) | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● |
| RS-485 | ● | ● | ● | ● | ● | ● | ||||||||
| CANopen | ● | ● | ||||||||||||
| EtherCAT | ● | ● | ||||||||||||
| 安全功能 | 动态刹车 | ● | ● | ● | ● | ● | ||||||||
| STO | ● | ● | ● | ● | ● | |||||||||
*:1 路模拟量输出
■ 驱动器规格 -P:脉冲控制型 -R:RS-485通讯型
| 输入 电源 | M3DV-21A8 M3DV-23A0 M3DV-24A5 M3DV-26A0 | 主回路电源 | 单相/ 三相,200 - 240V ±10%,50/60Hz |
|---|---|---|---|
| 控制回路电源 | 单相,200 - 240V ±10%,50/60Hz | ||
| M3DV-210A M3DV-213A | 主回路电源 | 三相,200 - 240V ±10%,50/60Hz | |
| 控制回路电源 | 单相,200 - 240V ±10%,50/60Hz | ||
| 绝缘耐压 | 一次对地:耐压 1500 VAC, 1 min, ( 泄漏: 20 mA) [220VAC 系列] | ||
| 使用 环境 | 温度 | 使用温度:0 ~ 50℃ ( 如果环境温度超过 45℃,请置于通风良好场所 ) 存储温度: -20℃ - 65℃ | |
| 湿度 | 存储及使用:10 - 85%RH, 无结露 | ||
| 海拔 | 海拔1000m 以下 | ||
| 振动 | 9.8m/s2以下, 10 - 60Hz ( 在共振点处不可持续使用) | ||
| 编码器反馈 | 20-bit 增量式 /绝对值光电编码器 17-bit 磁性增量式编码器 17-bit 无电池绝对值编码器 | ||
| I/O | 数字信号 | 输入 | -F/R/D 机型:10 路光耦隔离通用输入,可通过参数配置功能,5-24VDC,20mA -X/N/T机型:8 路光耦隔离通用输入,可通过参数配置功能,5-24VDC,20mA |
| 输出 | -F/R/D 机型:6 路光耦隔离通用输出,可通过参数配置功能,最大 30VDC,30mA -X/N/T机型:4 路光耦隔离通用输出,可通过参数配置功能,最大 30VDC,30mA | ||
| 模拟量信号*1 | 输入 | 2 路模拟量输入,-10~+10V,分辨率12bit | |
| 输出 | 2 路模拟量输出,-10~+10V,最大10mA | ||
| 脉冲信号*2 | 输入 | 2 路脉冲输入( 光耦输入,Line Receiver 输入): 光耦输入:5-24V 脉冲信号,最小脉宽 1μs,最大脉冲频率 500kHz Line Receiver 输入:5V差分信号,最小脉宽 0.125μs,最大脉冲频率 4MHz*5 | |
| 输出 | 4 路输出(3 路Line Driver 输出,1 路集电极开路输出) Line Driver 输出:编码器 A、B、Z 反馈输出 集电极开路输出:编码器 Z 相 | ||
| 通讯 | USB | 用于连接PC 机进行软件调试 | |
| RS-485 | Modbus/RTU 协议通讯 | ||
| 操作面板 | 4 个操作按钮 (MODE, UP, DOWN, SET) 5 位 LED显示 | ||
| 再生电阻 | 内置再生能量吸收电阻( 也可外接外部吸收电阻) | ||
| 控制模式*3 | 1. 脉冲位置模式 2. 模拟量速度模式 3. 模拟量转矩模式 4. 多段速度模式 5. 内部转矩模式 6. 内部速度模式 7. 指令位置模式 8 全闭环控制 可通过数字量输入切换各控制模式 | ||
| 控制输入信号 | Servo-ON 、报警清除、正转/反转禁止限位、 控制模式切换、增益切换、位置偏差清除、零速度箝位、指令转速输入方向控制、指令转矩输入方向控制、紧急停止、回原点、转矩限制、速度限制、脉冲输入禁止、多段速度选择输入、执行Q程序、通用输入 | ||
| 控制输出信号 | 故障输出(报错)、警告输出(报警)、Servo-Ready、电机制动器控制、速度到达、转矩到达、位置到达、Servo-ON状态输出、动态误差跟随输出、定位完成、零速信号、速度一致、转矩一致、速度限制中、转矩限制中、回原点完成、软件限位(正转、反转)、通用输出 | ||
| 保护功能 | 过流、过压、欠压、过热、编码器反馈异常、过载、速度过大、位置误差过大、紧急停止、正转/反转限位、全闭环位置控制误差过大、通讯异常、主回路电源缺相 | ||
| 动态刹车*4 | -F/X 机型内置 | ||
| STO*4 | -F/X 机型内置 | ||
| 重量 | M3DV-21A8 ■◆:0.8kg M3DV-26A0 ■◆:1.9kg M3DV-23A0 ■◆:1.1kg M3DV-210A ■◆:1.9kg M3DV-24A5 ■◆:1.6kg M3DV-213A ■◆:1.9kg | ||
注:*1、*2、*3、*4部分机型不支持,*5-RX/RN机型不支持。■:控制功能类别 ◆:机种类别
■ 驱动器规格 -EC:EtherCAT型 -C:CANopen型
| 输入 电源 | M3DV-21A8 M3DV-23A0 M3DV-24A5 M3DV-26A0 | 主回路电源 | 单相/ 三相,200 ~ 240V ±10%,50/60Hz |
|---|---|---|---|
| 控制回路电源 | 单相,200 ~ 240V ±10%,50/60Hz | ||
| M3DV-210A M3DV-213A | 主回路电源 | 三相,200 ~ 240V ±10%,50/60Hz | |
| 控制回路电源 | 单相,200 ~ 240V ±10%,50/60Hz | ||
| 绝缘耐压 | 一次对地:耐压 1500 VAC,1 min, ( 泄漏:20 mA) [220VAC 系列] | ||
| 使用 环境 | 温度 | 使用温度:0 ~ 50℃ ( 如果环境温度超过45℃,请置于通风良好场所) 存储温度: -20℃ ~ 65℃ | |
| 湿度 | 存储及使用:10 ~ 85%RH,无结露 | ||
| 海拔 | 海拔1000m 以下 | ||
| 振动 | 9.8m/s2 以下,10 ~ 60Hz ( 在共振点处不可持续使用) | ||
| 编码器反馈 | ◆ 20-bit 增量式 / 绝对值编码器 ◆ 17-bit 磁性增量式编码器 ◆ 17-bit 无电池绝对值编码器 | ||
| I/O | 数字信号 | 输入 | 8 路光耦隔离通用输入,可通过参数配置功能,5 ~ 24VDC,20mA |
| 输出 | 4 路光耦隔离通用输出,可通过参数配置功能,最大30VDC,30mA | ||
| 模拟量信号*1 | 输入 | 2 路模拟量输入,-10 ~ +10V,分辨率12bit | |
| 输出 | 1 路模拟量输出,-10 ~ +10V,最大10mA | ||
| 通讯 | USB | 用于连接PC 机进行软件调试 | |
| EtherCAT | -EC 控制功能类型:EtherCAT 通讯 | ||
| CANopen | -C 控制功能类型:CANopen 通讯 | ||
| 操作面板 | 4 个操作按钮 (MODE, UP, DOWN, SET) 5 位LED 显示 | ||
| 再生电阻 | 内置再生电阻( 也可外接外部再生电阻) | ||
| 控制模式*2 | -EC 控制功能类型: CoE( 符合CiA402 标准),支持PP,PV,TQ,CSP,CSV,CST 和HM模式,全闭环控制,预先存储在驱动器中的Q 程序也可通过EtherCAT 指令启动 -C 控制功能类型: 符合CiA402 标准,支持PP,PV,TQ 和HM 模式,全闭环控制,预先存储在驱动器中的Q 程序也可通过CANopen 指令启动 | ||
| 控制输入信号 | 报警清除、正转/反转禁止限位、 增益切换、零速度箝位、紧急停止、正/反方向运转扭矩限制、速度限制、通用输入 | ||
| 控制输出信号 | 故障输出( 报错)、警告输出( 报警)、Servo-Ready、电机制动器控制、速度到达、转矩到达、位置到达、Servo-on 状态输出、动态误差跟随输出、定位完成、零速信号、速度一致、转矩一致、速度限制中、转矩限制中、回原点完成、软件限位( 正转、反转)、通用输出 | ||
| 保护功能 | 过流、过压、欠压、过热、编码器反馈异常、过载、速度过大、位置误差过大、紧急停止、 正转/反转限位、全闭环混合偏差超限、通讯异常、主回路电源缺相 | ||
| 动态刹车*3 | -F/X 机型内置 | ||
| STO*3 | -F/X 机型内置 | ||
| 重量 | M3DV-21A8 ■◆:0.8kg M3DV-26A0 ■◆:1.9kg M3DV-23A0 ■◆:1.1kg M3DV-210A ■◆:1.9kg M3DV-24A5 ■◆:1.6kg M3DV-213A ■◆:1.9kg | ||
注:*1、*2、*3部分机型不支持。■:控制功能类别 ◆:机种类别
■ 驱动器规格 -IP:EtherNet/IP型
| 输入 电源 | M3DV-21A8 M3DV-23A0 M3DV-24A5 M3DV-26A0 | 主回路电源 | 单相/ 三相,200 ~ 240V ±10%,50/60Hz |
|---|---|---|---|
| 控制回路电源 | 单相,200 ~ 240V ±10%,50/60Hz | ||
| M3DV-210A M3DV-213A | 主回路电源 | 三相,200 ~ 240V ±10%,50/60Hz | |
| 控制回路电源 | 单相,200 ~ 240V ±10%,50/60Hz | ||
| 绝缘耐压 | 一次对地:耐压 1500 VAC,1 min, ( 泄漏:20 mA) [220VAC 系列] | ||
| 使用 环境 | 温度 | 使用温度:0 ~ 50℃ ( 如果环境温度超过45℃,请置于通风良好场所) 存储温度: -20℃ ~ 65℃ | |
| 湿度 | 存储及使用:10 ~ 85%RH,无结露 | ||
| 海拔 | 海拔1000m 以下 | ||
| 振动 | 9.8m/s2 以下,10 ~ 60Hz ( 在共振点处不可持续使用) | ||
| 编码器反馈 | ◆ 20-bit 增量式 / 绝对值编码器 ◆ 17-bit 磁性增量式编码器 ◆ 17-bit 无电池绝对值编码器 | ||
| I/O | 数字信号 | 输入 | 8 路光耦隔离通用输入,可通过参数配置功能,5 ~ 24VDC,20mA |
| 输出 | 4 路光耦隔离通用输出,可通过参数配置功能,最大30VDC,30mA | ||
| 模拟量信号*1 | 输入 | 2 路模拟量输入,-10 ~ +10V,分辨率12bit | |
| 输出 | 2 路模拟量输出,-10 ~ +10V,最大10mA | ||
| 通讯 | USB | 用于连接PC 机进行软件调试 | |
| Ethernet | Modbus/TCP、EtherNet/IP 通讯 | ||
| 操作面板 | 4 个操作按钮 (MODE, UP, DOWN, SET) 5 位LED 显示 | ||
| 再生电阻 | 内置再生电阻( 也可外接外部再生电阻) | ||
| 控制模式*2 | 1. 位置模式 2. 速度模式 3. 转矩模式 4. 全闭环控制 5. 预先存储在驱动器中的Q程序也可通过指令启动 | ||
| 控制输入信号 | 报警清除、正转/反转禁止限位、 增益切换、零速度箝位、紧急停止、正/反方向运转扭矩限制、速度限制、通用输入 | ||
| 控制输出信号 | 故障输出(报错)、警告输出(报警)、Servo-Ready、电机制动器控制、速度到达、转矩到达、位置到达、Servo-ON状态输出、动态误差跟随输出、定位完成、零速信号、速度一致、转矩一致、速度限制中、转矩限制中、回原点完成、软件限位(正转、反转)、通用输出 | ||
| 保护功能 | 过流、过压、欠压、过热、编码器反馈异常、过载、速度过大、位置误差过大、紧急停止、正转/反转限位、全闭环混合偏差超限、通讯异常、主回路电源缺相 | ||
| 动态刹车*3 | -X 机型内置 | ||
| STO*3 | -X 机型内置 | ||
| 重量 | M3DV-21A8 ■◆:0.8kg M3DV-26A0 ■◆:1.9kg M3DV-23A0 ■◆:1.1kg M3DV-210A ■◆:1.9kg M3DV-24A5 ■◆:1.6kg M3DV-213A ■◆:1.9kg | ||
注:*1、*2、*3部分机型不支持。■:控制功能类别 ◆:机种类别
■ 安规认证
| - | - | 驱动器 | 电机 |
|---|---|---|---|
| 欧洲 | EMC指令 | EN 61800-3 | EN 55011 |
| EN 55014-1 | |||
| EN 55014-2 | |||
| EN 6100-3-2 | |||
| EN 6100-3-3 | |||
| LVD | EN 61800-5-1 | EN 60034-1 | |
| EN 60034-5 | |||
| 功能安全(STO) | UL61800-5-2(SIL2) | - | |
| IEC61508 | - | ||
| ISO13849-1(PL d) | - | ||
| UL标准 | UL 61800-5-1 | UL 1004-1 | |
| UL 1004-6 | |||
| CSA标准 | C22.2 No.274-13 | CSA C22.2 No.100 | |
■ 电机通用规格
| 绝缘等级 | Class B (130℃ ) | 环境温度 | 使用温度:0℃ ~ 40℃;存储温度:-20℃ ~ 60℃ |
|---|---|---|---|
| 防护等级 | IP65( 除轴贯通部) | 湿度 | 存储及使用:20 ~ 85%RH ( 无结露) |
| 安装条件 | 室内安装,避免阳光直射,腐蚀性及易燃气体 | 海拔 | 海拔1000m 以下 |
| 震动 | 49m/s2 以下,10 ~ 60Hz ( 在共振点处不可持续使用) | - | - |
■ 制动器规格
电机制动器是用于当伺服系统断电时来防止电机转动。最常见的使用方式是当电机用于控制垂直负载时,在电机未使能状态或者断电状态下,为防止电机所驱动的机械机构因重力等原因产生移位,需要使用带制动器的伺服电机。
制动器在通电情况下,衔铁被吸附,制动器片释放,电机可以正常运行;当制动器断电时,衔铁会释放,制动器片被抱死,电机无法正常转动。
制动器在通电情况下,衔铁被吸附,制动器片释放,电机可以正常运行;当制动器断电时,衔铁会释放,制动器片被抱死,电机无法正常转动。
| 机座系列 | 40mm | 60mm | 80mm | 130mm | 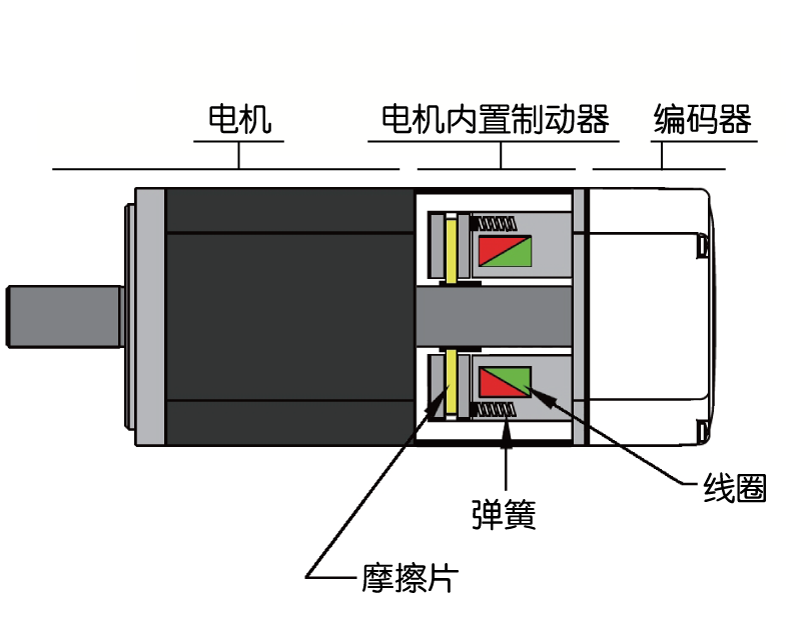 |
|---|---|---|---|---|---|
| 静态摩擦转矩 N·m | 0.32 | 1.5 | 3.2 | 18.5 | |
| 额定电压 VDC | 24 | ||||
| 功耗W(20℃时) | 6.3 | 7.2 | 9.6 | 24.3 | |
| 电流A | 0.26 | 0.3 | 0.4 | 1.05 | |
| 制动时间 | 标准气隙,20℃下 <70ms | ||||
| 释放时间 | <25ms | ||||
| 释放电压 | 18.5VDC max.(at 20℃) | ||||
■ 轴密封
电机工业级油封能够阻隔污染物(油类、杂质类)来延长电机寿命。出厂时油封会附在包装盒内,但不会安装在电机出轴上。油封对电机轴会产生一定的阻力,建议降额使用。

| 比较 | 型号名称 | 价格(未税) | 立即购买 |
|---|---|---|---|
|
|
M3DV-21A8PF | N/A | |
|
|
M3DV-23A0PF | N/A | |
|
|
M3DV-24A5PF | N/A | |
|
|
M3DV-21A8RF | N/A | |
|
|
M3DV-23A0RF | N/A | |
|
|
M3DV-24A5RF | N/A | |
|
|
M3DV-21A8PR | N/A | |
|
|
M3DV-23A0PR | N/A | |
|
|
M3DV-24A5PR | N/A | |
|
|
M3DV-21A8RR | N/A | |
|
|
M3DV-23A0RR | N/A | |
|
|
M3DV-24A5RR | N/A | |
|
|
M3DV-21A8RD | N/A | |
|
|
M3DV-23A0RD | N/A | |
|
|
M3DV-24A5RD | ¥1,450.00 |
添加至购物车
|
|
|
M3DV-21A8RX | N/A | |
|
|
M3DV-23A0RX | N/A | |
|
|
M3DV-24A5RX | N/A | |
|
|
M3DV-21A8RT | N/A | |
|
|
M3DV-23A0RT | N/A | |
|
|
M3DV-24A5RT | N/A | |
|
|
M3DV-21A8ECX | N/A | |
|
|
M3DV-23A0ECX | N/A | |
|
|
M3DV-24A5ECX | N/A | |
|
|
M3DV-21A8PN | N/A | |
|
|
M3DV-23A0PN | N/A | |
|
|
M3DV-24A5PN | N/A | |
|
|
M3DV-21A8RN | N/A | |
|
|
M3DV-23A0RN | N/A | |
|
|
M3DV-24A5RN | N/A | |
|
|
M3DV-21A8ECN | N/A | |
|
|
M3DV-23A0ECN | N/A | |
|
|
M3DV-24A5ECN | N/A | |
|
|
M3DV-26A0RF | N/A | |
|
|
M3DV-210ARF | N/A | |
|
|
M3DV-213ARF | N/A | |
|
|
M3DV-26A0ECX | N/A | |
|
|
M3DV-210AECX | N/A | |
|
|
M3DV-213AECX | N/A | |
|
|
M3DV-21A8CX | N/A | |
|
|
M3DV-23A0CX | N/A | |
|
|
M3DV-24A5CX | N/A | |
|
|
M3DV-26A0CX | N/A | |
|
|
M3DV-210ACX | N/A | |
|
|
M3DV-213ACX | N/A | |
|
|
M3DV-21A8CN | N/A | |
|
|
M3DV-23A0CN | N/A | |
|
|
M3DV-24A5CN | N/A |
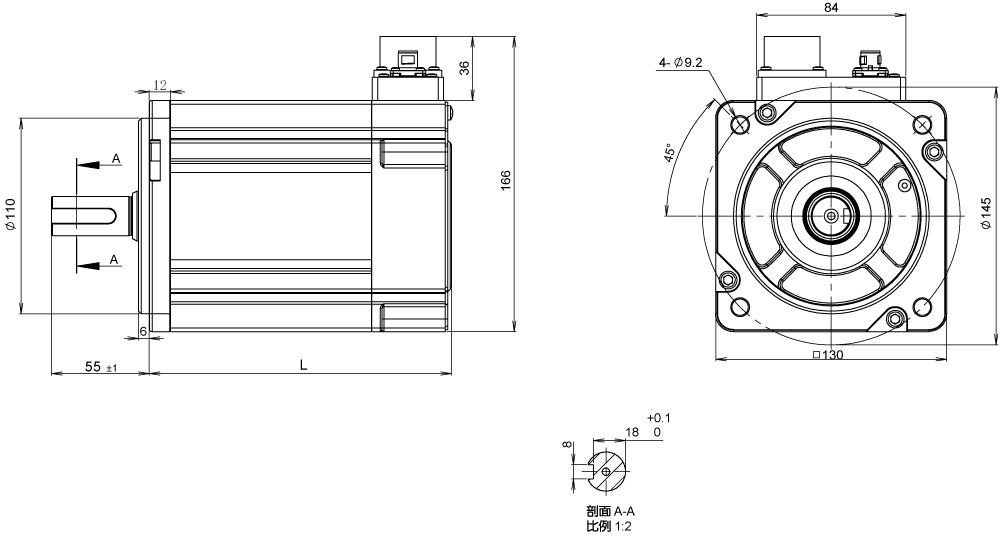
■ AC伺服电机














■ 驱动器(单位:mm)
□ M3DV-21A8 ■◆

□ M3DV-23A0 ■◆

□ M3DV-24A5 ■◆

□ M3DV-26A0 ■◆ / M3DV-210A ■◆ / M3DV-213A ■◆

注: ■:控制功能类别 ◆:机种类别
■ 低惯量伺服电机(单位:mm)
□ 40mm机座
□ 无制动器机型

□ 制动器机型

| 型号 | L |
|---|---|
| SM3L-042A ◇ NDV | 91.5 |
| SM3L-042ABNDV | 100 |
| 型号 | L |
|---|---|
| SM3L-042A ◇ BDV | 134.5 |
| SM3L-042ABBDV | 143 |
◇:表示编码器类型
□ 60mm机座
□ 无制动器机型

□ 制动器机型

| 型号 | L |
|---|---|
| SM3L - 061A ◇ NDV | 85.5 |
| SM3L - 062A ◇ NDV | 104 |
| 型号 | L |
|---|---|
| SM3L - 061A ◇ BDV | 126 |
| SM3L - 062A ◇ BDV | 144.5 |
◇:表示编码器类型。
□ 80mm机座
□ 无制动器机型

□ 制动器机型

◇:表示编码器类型
| 型号 | L |
|---|---|
| SM3L-083A ◇ NDV | 115 |
| SM3L-084A ◇ NDV | 129 |
| 型号 | L |
|---|---|
| SM3L-083A ◇ BDV | 157.5 |
| SM3L-084A ◇ BDV | 171.5 |
◇:表示编码器类型
■ 中惯量伺服电机(单位:mm)
□ 60mm机座
□ 无制动器机型

□ 制动器机型

| 型号 | L |
|---|---|
| SM3M-062A ◇ NDV | 115 |
| 型号 | L |
|---|---|
| SM3M-062A ◇ BDV | 155.5 |
◇:表示编码器类型
□ 80mm机座
□ 无制动器机型
□ 制动器机型
◇:表示编码器类型
| 型号 | L |
|---|---|
| SM3M-083A ◇ NDV | 125.5 |
| 型号 | L |
|---|---|
| SM3M-083A ◇ BDV | 168.5 |
◇:表示编码器类型
□ 130mm机座
□ 无制动器机型

| 型号 | L | |
|---|---|---|
| 无制动器 | SM3M-132A◇NMV | 137 |
| SM3M-133A◇NMV | 151 | |
| SM3M-134A◇NMV | 168 | |
| SM3M-135A◇NMV | 203 | |
| 带制动器 | SM3M-132A◇BMV | 170 |
| SM3M-133A◇BMV | 184 | |
| SM3M-134A◇BMV | 201 | |
| SM3M-135A◇BMV | 238 | |
◇:表示编码器类型A或3
■ 高惯量伺服电机(单位:mm)
□ 130mm机座
□ 无制动器机型
| 型号 | L | |
|---|---|---|
| 无制动器 | SM3H-132A◇NMV | 137 |
| SM3H-133A◇NMV | 151 | |
| SM3H-134A◇NMV | 168 | |
| 带制动器 | SM3H-132A◇BMV | 170 |
| SM3H-133A◇BMV | 184 | |
| SM3H-134A◇BMV | 201 | |
◇:表示编码器类型A或3
2D尺寸图
3D模型
宣传手册
| 标题 | 文件类型 | 大小(KB) | 下载 |
|---|---|---|---|
| M3 Family Brochure_CN-A8-20230809-L.pdf | 7002 |
使用手册
| 标题 | 文件类型 | 大小(KB) | 下载 |
|---|---|---|---|
| Modbus Manual_CN20250902-V1.5.pdf | 4039 | ||
| M3 EtherCAT UserManual-CN20221228.pdf | 2144 | ||
| M3 EtherCAT Hardware Manual_CN20221228.pdf | 4248 | ||
| M3 CANopen Hardware Manual_CN20221228.pdf | 4400 |
相关证书
| 标题 | 文件类型 | 大小(KB) | 下载 |
|---|---|---|---|
| ROHS declaration-2026-A0.pdf | 178 | ||
| M56S&M3DV系列驱动UL证书.pdf | 235 | ||
| M56S&M3DV驱动器STO符合性证书.pdf | 366 | ||
| M5&M3DV系列驱动器CE认证证书-EMC.pdf | 1659 | ||
| M5&M3DV系列驱动器CE认证证书-LVD.pdf | 1374 |
相关软件
| 标题 | 文件类型 | 大小(KB) | 下载 |
|---|---|---|---|
| Luna Setup 4.0.25.0428.zip | RAR | 31133 | |
| AMA Servo EtherCAT v3.4.20.zip | XML | 165 |
按产品类型筛选
所有产品I/O 信号线
USB配置线
再生放电钳


专业的产品标签
考虑到所有可能的苛刻应用环境,MOONS'为每个产品设计的标签通过了耐水性测试,耐久性摩擦测试,耐高温性和耐腐蚀性测试。另外,我们的产品标贴印有含产品详情页的二维码,便于用户随时掌握产品详细信息。

提示:此标签适用于步进电机产品。


(专业包装盒和独特外观设计)


(单台产品外加裹珍珠棉)


(多台产品有外箱包装)
安全包装
为了确保您的货物能够承受长途旅行并安全到达,MOONS'特别设计了结构牢固的包装纸箱,并通过内部跌落测试。纸箱由可回收材料制成,为您提供专业的安全交货。
无论用户购买单台产品还是多台产品,我们均用内外双层包装防护进一步减小产品被损害的风险。
出货可视化
我们每一单出货前,都经过有经验的仓储人员悉心包装,并将重要过程公布于网站,用户下单后可清晰看到已购产品的出货过程以及物流状态。

(展示包装盒内产品)


(发货单放入包装盒)


(附上商品箱贴)


(展示物流运单)

快速交货
MOONS'选择顺丰作为我们主要的国内快递合作伙伴。作为国内领先的物流专家,顺丰为我们的客户提供快速和专业的中国大陆门到门送货服务。专业仓储管理
MOONS'拥有经验丰富的仓储管理团队,所有产品和原材料均分门别类、陈设整齐。